When you apply, we will ask you to provide a ranking of prospective mentors and select from a list of research projects that you would potentially be interested in working on. To frame the social relevance of the research, each project is aligned with at least one Sustainable Development Goal (SDG) defined by the United Nations.
Your mentor rankings and project selections are important because they will determine which people will evaluate your application. We therefore encourage applicants to explore each mentor's website to learn more about the individual research activities of each lab. Note that some mentors listed below have more than one project.

SDG: Good Health and Well-Being
Research has shown multiple benefits to health and well-being from exposure to natural environments ("forest-bathing"). In situations where access to real-life nature isn't an option, such as during hospitalization or dialysis, micro-doses of virtual reality-based nature immersion may offer some value. In this project, the summer interns will work with an interdisciplinary team of computer scientists and psychologists to explore fundamental questions informing the optimal development and deployment of VR technologies for this purpose.
Mentor: Zhu-Tian Chen
SDGs: Decent Work and Economic Growth, Sustainable Cities and Communities
Augmented Reality (AR) has shown potential to assist individuals across a wide spectrum of disabilities, including those with visual impairments, hearing difficulties, and cognitive disorders, by leveraging its real-time, multi-modal capabilities. This project seeks to harness the power of AR through an intelligent agent designed to assist individuals in their daily tasks. Our AR agent will serve as an assistive tool to foster an inclusive environment for individuals in various contexts, including workplaces, educational settings, and public areas, making our daily environments safer, more intelligent, and more welcoming for everyone, especially those in vulnerable situations. Participants in this project will have the opportunity to work on cutting-edge AR interfaces, delve into AI integration, and apply human-centric design principles. Students will advance their technical skills in AR and AI and their understanding of how these technologies can be applied to enrich human experiences across different domains.
Learning AI by Seeing It: Interactive Visualization for Inclusive AI Education
Mentor: Qianwen Wang
SDG: Reduced Inequalities
As AI becomes increasingly embedded in society, access to AI knowledge and the ability to effectively use and collaborate with AI remain uneven, often restricted to those with formal training or technical expertise. This disparity creates barriers to AI literacy, limiting opportunities for broader engagement and innovation. This project seeks to democratize AI by developing novel interactive visualization tools to make complex AI concepts more intuitive, engaging, and accessible to a diverse audience. This project builds on an ongoing initiative within our research group. By breaking down AI models, workflows, and applications into visually-driven learning experiences, we aim to empower individuals—regardless of their educational background—to develop a deeper understanding of AI and its applications. We are looking for motivated students who are passionate about AI explainability and human-AI collaboration. A basic understanding of front-end development (e.g., JavaScript, D3.js, or similar frameworks) would be beneficial, but the most important qualities are curiosity and creativity.
Evaluating Generative AI for its Safety for Mental Health, Well-Being, and Thinking
Mentor: Stevie Chancellor
SDG: Good Health and Well-Being
Description will be added soon.
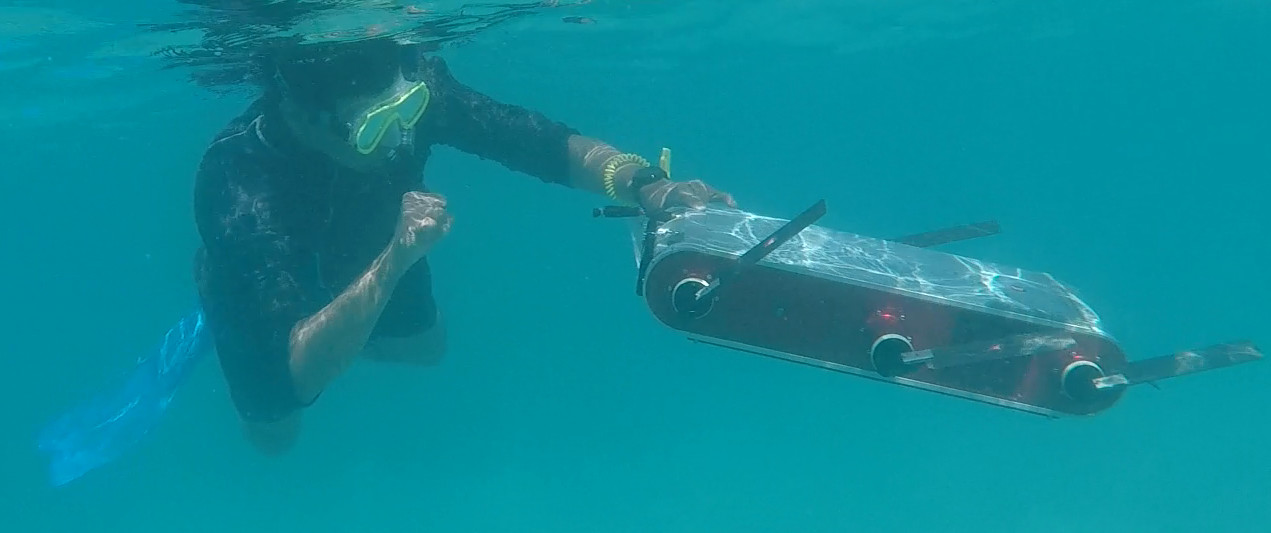
Robust Hand Gesture Recognition for Diver–AUV Communication on Edge Devices
Mentor: Junaed Sattar
SDGs: Clean Water and Sanitation; Life Below Water
Autonomous underwater vehicles (AUVs) have seen rapid growth in applications in many underwater tasks of late. However, many of these applications require close collaboration with human scuba diving experts . It is imperative for the robots to understand instructions communicated by divers via hand gestures. These gestures must be robustly interpreted, minimizing errors from random false detections and spurious hand motion, all without the use of any cloud infrastructure, running on-device edge devices. This project will investigate the optimization and refinement of hand gesture algorithms to run robustly onboard the MeCO AUV, for diver robot collaborative missions. This will involve working on deep machine learning architectures, optimizing them to run on Nvidia Jetson platforms, and integrating the system onboard a physical underwater robot. Evaluation of this project will take place in both pool and lake environments in the summer.